On the morning of June 29th, the research group held the ninth session of “Li Nan Research Group’s Academic Lecture Series”. The event was co-chaired by Mr. Fang Dongping and Mr. Li Nan, and Professor Yong Kwon Cho from Georgia Institute of Technology, the US, was invited to give a keynote report on “the application of robotics in construction and disaster rescue”.
Professor Cho delivered a keynote report on the application technology of intelligent robots in construction and disaster rescue. The report was divided into two parts. The first part mainly introduced the robot detection in the construction sites and the research method used in background information processing. The second part mainly showed the important assistant role of robotics technology in the remote control of construction equipment in complex environments.
First, the research team developed a data processing framework for robot data collection and process monitoring on construction sites, and built a data processing pipeline based on robot (including unmanned vehicles, unmanned vehicles, etc.) data collection, cloud server information processing, semantic analysis, site quality control and other technologies. The framework can provide basis for the construction process monitoring and quality control, and lay the foundation for the entire management process of construction sites. Professor Cho mentioned that different types of robots have their own advantages and disadvantages. For example, UAV measurement is low in time-consuming, requires a low cost and can collect the overhead data, but the data is not as accurate as that collected by unmanned vehicles. In actual work, different types of robots are usually combined to collect data.
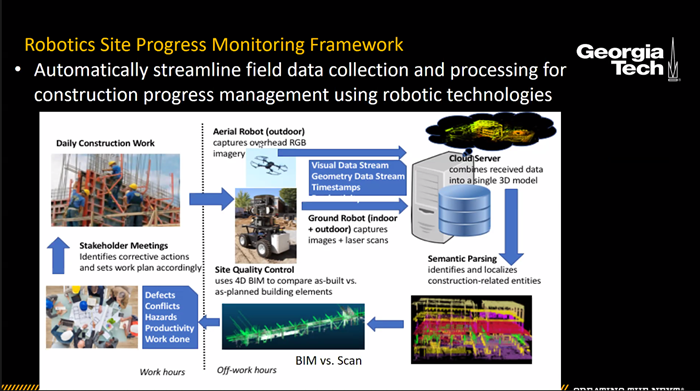
Figure: Mobile robot-based data collection and processing framework proposed by Professor Cho’s team
Compared with indoor environments, data acquisition in outdoor environments is more challenging. For example, poor ground conditions and obstacles can cause robots to roll over or collide. Therefore, the research team studied the moving route design of the robots at the construction site. In addition, most of the traditional point cloud semantic segmentation is based on a single frame or offline, which is not real-time and cannot integrate the results of segmentation over time. Professor Cho led the research team to propose a rich semantic 3D point cloud in the online increasing generation environment of mobile robots.
The second part of the report shows the related researches around robotics in creating spatial maps in harsh environments and assisting operators in remote device control. In performing designated tasks such as excavation and repair at construction and disaster sites, operators achieve remote control of equipment at the construction site with the help of cameras installed on the top of construction equipment (such as excavator). However, the traditional camera lens has a limited field of vision, and can only transmit two-dimensional image information, which can not realize the depth measurement and other functions. Therefore, it is difficult for the operators to achieve the efficient and accurate command of the robot’s performance of tasks through the media. Therefore, the researchers proposed a mobile robot-based 3D real-time working environment sensing system, namely the GHOST system, which can improve the robot’s environment and situation sensing performance, helping to improve the effectiveness of the robot’s remote control control. The system combines measurement robot and cameras, using laser scanning, automated object recognition, pose estimation and 3D visualization, to provide both 2D and 3D real-time feedback for operators, improving the safety and intelligence of remote control. In terms of remote control, the research team has modified the traditional excavator control system to help in the development of unmanned excavation robots.
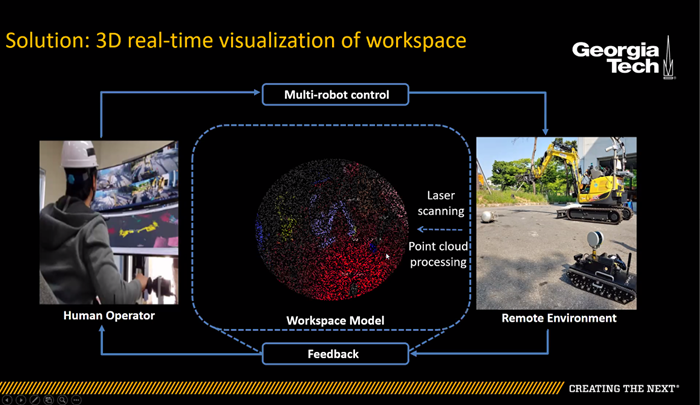
Figure: The 3D real-time working environment sensing system proposed by Professor Cho’s team
In the subsequent Q&A and discussion sessions, Professor Cho shared his ideas on the impact of the network environment on the remote control effect and the difficulty in using UAV detection technology in high-rise buildings. The application of robotics technology is a growing area in the construction industry, which has an important impact on improving the intelligence level of the whole construction industry and even the design industry, but there are also problems such as a high cost and great difficulty in implementation.
At the end of the report, Professor Cho shared some of his research experience for doctoral candidates, encouraged everyone to communicate more and actively improve presentation skills and academic writing ability in English. In addition, doctoral candidates should enrich knowledge in their professional fields through extensive reading, and lay the foundation for their academic writing. Professor Cho also encouraged students to ask more questions in class and in their daily communication with their tutors, take the initiative to share their research ideas rather than keep silent. In addition, Professor Cho pointed out that good teachers should master the teaching methods. Doctoral candidates who wish to become lecturers in the future should also exercise their teaching skills during their daily study and work. Professor Cho also shared his experience with international students about overcoming the cultural shock, and suggested that everyone should make more friends and expand their interest during their doctoral studies, and “find your own time”, since it will help relieve mental stress and maintain physical and mental health.
